
CAGE: 5JDZ0
R3000 Rotopod
500 lb
227 kg
Payload
7.8 in ø
200 mm ø
Working Volume (X,Y)
5.9 in
150 mm
Working Volume (Z)
0.0004 in
10 µm
Repeatability
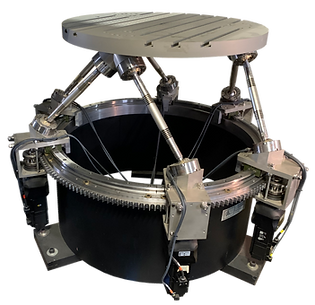
Our patented rotary-style parallel robot is capable of 720º of rotation in yaw. This system design is often used for simulation and medical research where both rotation and accuracy are necessary.
Some applications require 360 (or more) degrees of rotation. With Mikrolar's patented R-Series Rotopod, you can have all the rotation you require, while maintaining the stiffness and accuracy inherent in a parallel mechanism.
The current standard model of the R-Series Rotopod is the R3000. Compared to the legacy R2000, the R3000 has seen an improvement in stiffness and quieter motion. The addition of the Nexen Ring, THK rail, and Hephaist joints to our device has provided one of the quickest, high-payload-capable Parallel Robots by attaining accelerations of up to 2G. (If that's still not enough for your particular application, take a look at our current fastest R3100 Rotopod.)
The R3000 has been applied to research in the medical field due to its rotational capability and repeatability. If you would like to learn more about a few of these research projects, see our page on Bio-Mechanical Applications. You can also find a video playlist of our medical customers on our Youtube channel. Along with that, we have had the exciting opportunity to assist in the development of the James-Webb Space Telescope. One of our Rotopods acted as a positional platform for the optical equipment used in calibrating each of the primary mirrors.
All of our robots use the same core software; how you communicate with them is up to you. With the use of the same simple user interface as every other Mikrolar robot, you will find operating and programming this Hexapod to be both simple and straight-forward. Whether you wish to use a language you are already familiar with such as G-code, or you require a custom designed solution such as feedback from exterior measuring devices, Mikrolar can write a custom interface to suit your needs.
R3000 Rotopod
# of Axes
6
Footprint
1,349 mm ø
Height (Max)
1,058 mm
Table Top Size
840 mm ø
Mechanical Weight
690 kg
Performance
Max Translation (X,Y)
200 mm ø
Max Heave (Z)
150 mm
Pitch and Roll (A,B)
± 20°
Yaw (C)
± 720°
Motion Speed
X,Y,Z - 100 mm/s
Angular Feed Rate
271°/s
Min Thrust Z
136 kg
Max Thrust Z
816 kg
Repeatability
10 μm
Accuracy
± 75 μm
Ambient Temperature
0 to 45°C
Mechanical Brakes
All Axes
Power Requirements
208/230V, 100A
Environmental Spec
IP54
R3000 Test Run Footage.
